Members
RISA-3D
uses a Physical Member that
is automatically sub-meshed into general-purpose beam elements.
Draw Members
To create new
![]()
Click on image to enlarge it
The Member Drawing Options are as follows:
Member Drawing Options
|
Option |
Description |
|---|---|
|
Draw Node to Node |
Use the first mouse click to select the start node of the new member. Use the second mouse click to select the end node of the new member. The tool will continue to draw node to node until you right-click to disengage. |
|
Draw Node to Member/Wall |
Use the first mouse click to select the start node of the new member. Use the second mouse click to select an existing member which would contain the end node of the new member. ‘Offset’ is the offset of the end point of the new member from the start node of the existing member. |
|
Draw Member to Member |
Use the first mouse click to select an existing member which would contain the start node of the new member. Use the second mouse click to select an existing member which would contain the end point of the new member. ‘1st Offset’ and ‘2nd Offset’ are the location offsets of the start and end nodes of the new member from the start nodes of the existing members. |
|
Draw Wall to Wall |
Use the first mouse click to select an edge of an existing wall panel which will contain the start node of the new member. Use the second mouse click to select an edge of an existing wall panel which will contain the end node of the new member. ‘1st Offset’ and ‘2nd Offset’ are the location offsets of the start and end nodes of the new member from the corner of the selected wall panel edge. |
|
Draw Member/Wall to Node |
Use the mouse click to select the existing member which would contain the start node of the new member. The new member would have a length equal to ‘Length’. The new member would be created at an angle ‘Relative Angle’ to the projection of the existing member on the horizontal plane (plane perpendicular to the vertical axis). |
To draw
- If there is not a model view already open then go to the View ribbon.
- Click the Open 3D Viewsicon in the’ Window’ section to open a new view.
- If
you are not drawing between existing
- Go to the Home ribbon.
- Click the Members icon in the ‘Draw Elements’ section.
-
In the Properties panel, set the
You can specify the General Properties, Additional Properties, RISAConnection Properties, and Design Properties.
-
To start drawing
The first click defines the I-end of the first
The new
- To stop drawing altogether click the right mouse button or press the Esc key.
- You may also specify
or edit
- You may undo any
mistakes by clicking the
 Undo icon in the Quick Access toolbar.
Undo icon in the Quick Access toolbar.
Modify Members
There are a number of ways to modify
-
You can view and edit the
-
-
You can use the tools in the Modify ribbon to graphically modify the members in the 3D View.
The Properties Panel for members is discussed here which lets you modify the
properties of
Member Properties
The parameters in the MemberProperties section are the
To modify
- If there is not a model view already open then go to the View ribbon.
- Click the Open 3D Views icon to open a new view.
- Click a single
-
If you have multiple elements selected, specify which material type to view properties for using the Selection Properties dropdown in the Properties panel.

Click on image to enlarge it
-
Set the parameters for the
If certain properties vary within your selection of
-
You may choose to modify a single
To modify a single
To modify a selection of

 button.
button.General Properties
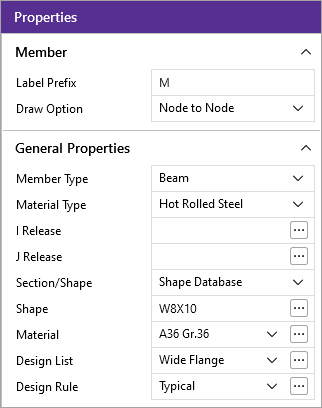
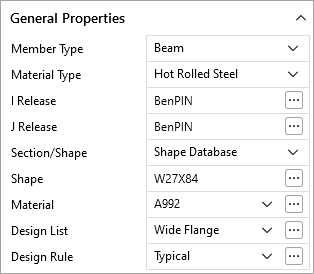
In the General Properties section of the Properties panel, you can specify the member parameters such as member end release, material, and shape size. The parameters shown can be found in the Primary and Advanced tab of the Members spreadsheet.
You can assign a shape by either using a Section Set or choosing a specific shape from the Shape Database.
If you assign a shape using a Section Set, several parameters like shape size and material will gray out and the displayed values will be based on the Section Set. These parameters can be found in the Section Sets spreadsheet.
You can modify the general properties based on material type for a single member by clicking on a member or for multiple members by selecting multiple members and selecting a material type from the Selection Properties dropdown in the Properties panel.
- You may also modify
- You can add a new Section Set by setting the Assign Shape parameter to Section Set and clicking the triple dot next to the Section Set dropdown.
Additional Properties
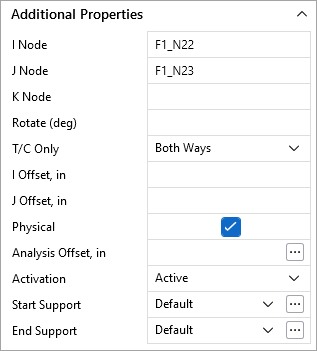
In the Additional Properties section of the Properties panel, you can specify the member parameters such as member start and end nodes, physical or non physical member properties, and analysis offset. The parameters shown can be found in the Primary and Advanced tab of the Members spreadsheet.
You can modify the general properties based on material type for a single member by clicking on a member or for multiple members by selecting multiple members and selecting a material type from the Selection Properties dropdown in the Properties panel.
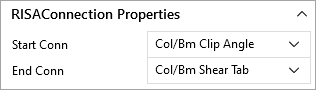
RISAConnection Properties
In the RISAConnection Properties section of the Properties panel, you can view and define the connection rules for your hot-rolled steel connection design to be used in conjunction with RISAConnection. The connection rule parameters can be found in the RISAConnection tab of the Members spreadsheet. See the RISAConnection Integration topic for more information.
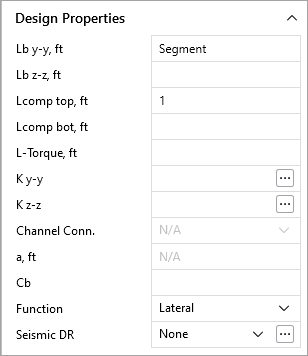
Design Properties
In the Design Properties section of the Properties panel, you can specify the Hot Rolled, Cold Formed, Wood, Concrete, Aluminum, or Stainless design parameters such as unbraced lengths and K factors. See Steel Design, Cold Formed Steel Design, Stainless Design, Concrete Design, Aluminum Design, and Wood Design for information on the design parameters themselves. The parameters shown are the same as those on the Hot Rolled, Cold Formed, Wood, Concrete, Aluminum, or Stainless tab of the Members spreadsheet. The Seismic Design Rule can be found on the Advanced tab of the Members spreadsheet and only pertains to hot rolled steel members.
You can modify the design parameters based on material type for a single member by clicking on a member or for multiple members by selecting multiple members and selecting a material type from the Selection Properties dropdown in the Properties panel.
Material and Cross Section Properties
Member material and cross section properties may be assigned to a member in one of two ways – either directly by specifying the shape and material explicitly, or by assigning a Section Set to the member. Section Sets allow you to control properties for a group of members that share the same properties. Combining section sets with the Member Redesign feature gives you great control over how new member sizes are picked and what members get updated. Section sets must be used when the desired shape is not in the database or when steel redesign (optimization) is desired. See Section Sets for more information.
All member properties may be assigned in the Properties panel either as you draw or later as a modification to the members.
Members Spreadsheet
The Members Spreadsheet records the properties for the

Click on image to enlarge it
The following data columns hold the
|
Column |
Description |
|---|---|
|
You can assign a unique Label to any or all of the You can relabel |
|
|
The I-Joint and J-Joint entries define the start (I-joint) and end (J-joint) locations of the member. The member local axes are defined based on these joints. See Member Local Axes for more information. |
|
|
These two parameters may be used separately or together to define the rotation of a member. See Member Local Axes and Defining Member Orientation for more information. |
|
|
If you are explicitly assigning shapes to each member, then enter the database shape you wish to use for the member. You can select this by clicking on the arrow in the cell. Alternatively, you may choose a section set to represent the section properties, material properties, and re-design parameters. |
|
|
If you are explicitly assigning shapes to each member, then you may enter the member type that you wish to use. The choices are Column, Beam, Vertical Brace, and Horizontal Brace. Here are the main effects that the member type will have on your structure:
Note: If you are using
Section Sets to define your member, the information in this
field is generated automatically based on the referenced section
set.
|
|
|
If you are explicitly assigning shapes to each member, then you may enter the design list type that you wish to use. This entry will affect the members that are available to program when it is suggesting alternate or optimized shapes. Refer to Design Optimization for more information on the member optimization procedure. Also refer to Appendix A – Redesign Lists for information on creating or editing these lists. Note: If you are using
Section Sets to define your member, the information in this
field is generated automatically based on the referenced section
set.
|
|
|
If you are explicitly assigning shapes to each member, then you may enter the material that you wish to use. You can select this by clicking on the arrow in the cell. Note: If you are using
Section Sets to define your member, the information in this
field is generated automatically based on the referenced section
set.
|
|
|
If you are explicitly assigning shapes to each member, you can enter the design rules type that you wish to use. When the program is checking alternate or optimized shapes, it will restrict its selections to members that obey the chosen design rules. Refer to Design Rules– Size / U.C. for more information. Note: If you are using
Section Sets to define your member, then the information in this
field will be generated automatically based on the referenced section
set.
|
Members Spreadsheet - Advanced Data
The Advanced tab records the properties for the member elements and may be accessed by selecting Members on the Spreadsheets Menu.

Click on image to enlarge it
The following data columns hold the Advanced data for the members:
Member Spreadsheet - Advanced Data
|
Column |
Description |
|---|---|
|
The I and J Releases control the forces that may be resisted by a member. You can use these to define pinned connections, truss members, and any other end condition. See Member End Releases for more information. |
|
|
Col-Wall Vert Release |
This option is only visible and applicable for columns transferred from RISAFloor. It defines the vertical connectivity between the column and the connected wall panel. If checked, the column and wall panel will be decoupled in the vertical direction during analysis. See Col-Wall Vert Release for more information. |
|
The I and J End offsets may be used to model a rigid end zone for a member. See Member End Offsets for more information. |
|
|
The T/C Only field is used to indicate that a member is to be Tension or Compression only. When a member is flagged as C, any members it will only be able to take compressive loads. The member will have no stiffness to resist tensile loads. When a member is flagged as T, the member will only be able to take tension loads. When a section is flagged as E, the member will primarily take only tension loads, however it will also take some compression load, up to its Euler buckling load. |
|
|
The Physical box is checked if the member is a Physical Member. See Physical Members for more information. |
|
|
The Deflection Ratio Options are only applicable to members designated as beams. This field is used to designate the member end behavior either as supported or as a cantilever for the deflection ratio. If this field is blank, deflection ratio will be based on original member behavior. See Deflection Ratio Options to learn more. |
|
|
Members may be offset from their centerline for analysis. This is useful for members such as single angles bolted or welded on only one leg, where axial compression also needs to induce bending. See Analysis Offset to learn more. |
|
|
Members may be removed from the solution without deleting them from your model by making them inactive. See Inactive and Excluded Elements for more information. |
|
|
Seismic Design Rules can be used to assign a Seismic Design Rule to each member individually. This can be left as None if you are not including seismic detailing in your design. This entry will only apply to Hot Rolled Steel members. |
Members Spreadsheet - Detailing Data
The Detailing tab records the detailing data for the members that are necessary for full 2-way data transfer between RISA and steel detailing packages. For more information on this subject refer to the Help file for the RISA CIS/2 Translator which can be downloaded from our website.

Click on image to enlarge it
Tension/Compression-Only Members
Members in RISA by default are allowed to take both tension and compression. However, some design or modeling practices may require you to define specific members as either Compression Only or Tension Only. Here we will define what each of the T/C Only options means.
Both Ways
This is the default behavior. In this scenario a member will be allowed to take either compression or tension and the program will base the combined bending and axial code checks on these forces.
Tension Only/Euler Buckling
Tension-only behavior is just as it sounds. When a member is defined as tension-only the program will allow these members to only resist tension forces. If the load path introduces compression forces into the member, then it will be removed from the stiffness matrix and another solution will be run.
- To avoid stability issues, the program will allow the Tension Only member to resist a very small percentage of compression in the member. By allowing the member to take 1e-8 of the member's stiffness in resistance to compression, the program can avoid model instabilities which would be caused by removing the Tension Only member all together.
- Tension-only member code checks will ONLY consider axial tension. Bending forces will NOT be used when computing code checks.
Euler Buckling
An option similar to tension-only is the Euler buckling option. This option is used as a replacement to tension-only and allows a member to take up to the Euler buckling capacity of the member in compression before it is removed.
The reason for the Euler buckling option is that allowing tension-only members to take a little compression helps model convergence greatly. Generally speaking, tension-only members are generally very slender members that have a small Euler buckling capacity. The intent of this option is to allow a very small amount of compression to get into your members so you don't get unstable models.
- Euler buckling member code checks will ONLY consider axial tension. Bending and compression forces will NOT be used when computing code checks.
- You can control the amount of compression that an Euler buckling member takes by artificially increasing or decreasing the Kl/r ratio that is used to calculate the Euler buckling load. The best way to alter the Kl/r ratio is to modify the Lb parameters for that member on the Hot Rolled, Cold Formed or Wood tabs of the Members spreadsheet.
- Using this option for members with high Euler buckling capacities is generally not appropriate and may lead to unconservative results.
Compression Only
Compression-only behavior is just as it sounds. When a member is defined as compression-only the program will allow these members to only resist compression forces. If there are tension forces then the member will be removed and another solution will be run.
- To avoid stability issues, the program will allow the Compression Only member to resist a very small percentage of tension in the member. By allowing the member to take 1e-6% of the member's stiffness in resistance to tension, the program can avoid model instabilities which would be caused by ignoring the Compression only member all together.
- Compression-only member code checks will ONLY consider axial compression. Bending forces will NOT be used when computing code checks.
Iterative Solution Considerations
When a model contains T/C only members, the program must iterate the solution until it converges. Each iteration is a solution of the model. After each solution the program checks T/C only member forces. If a tension-only member has compression then this member has it's stiffness reduced down to 1e-8% of it's original stiffness so it will take no forces. If an Euler buckling member has a compression greater than its Euler buckling load this member has it's stiffness reduced down to 1e-8% of it's original stiffness. If a compression-only member has tension then this member has it's stiffness reduced in a similar fashion. After these member stiffnesses are reduced the stiffness matrix is re-built and another solution is run.
In subsequent solutions members can have their stiffnesses both removed and added back in. Reducing the stiffness of members is the identical process just explained. Adding member stiffness back in can occur for members that have been previously reduced. The program will look at the distance between the end nodes which define the previously reduced member. From this distance the program can calculate whether that member would now be in compression or tension. Let's take a tension-only member that had it's stiffness reduced due to the presence of compression in the first iteration. In the 2nd iteration if the distance between the nodes defining the member got longer than it was in iteration one, this would signify that the member would now be in tension. Thus, for the next iteration the program would place this member back in the stiffness matrix.
Because of this iterative solution, models with T/C only members can take a bit longer to solve than a regular static solution.
- If a member has it's stiffness reduced, it will still show up in the results. However, the forces and code checks for this member will all be zero.
- For X-bracing that is set to either tension-only or Euler buckling, do not place a node at the intersection of these braces. You will likely have convergence problems in this case and receive error code 1162.
Instability Considerations
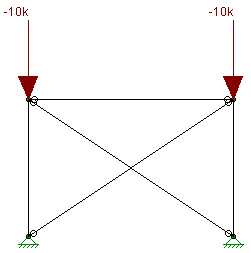
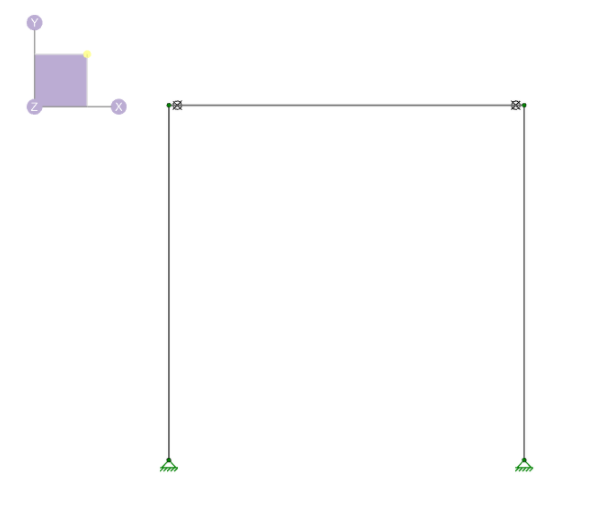
For members defined as tension-only you can run into problems with instabilities for gravity-only LC's. For example, let's take a look at an x-braced frame where the x-bracing is defined as tension-only. For a lateral load combination, the tension-only feature works great.
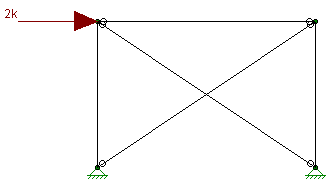
|
|
In the image above we can see that the "compression" brace has no force in it because it has it's stiffness reduced in the stiffness matrix and that all of the load is passing through the "tension" brace.
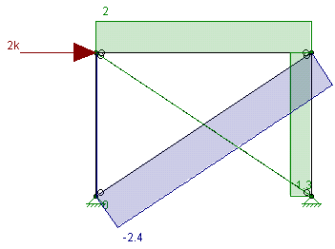
However, if we are looking at a gravity load combination, this results in an instability.
|
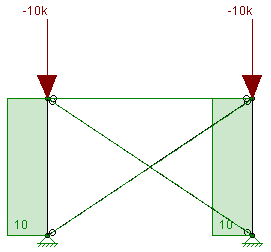
|
In this scenario the columns in this model undergo a small amount of axial shortening. This induces a small amount of compression and both of the tension-only braces have their stiffnesses reduced. This results in a frame that is unstable and illustrates the problem. The solution here is to use Euler buckling braces.
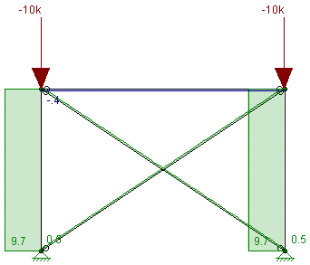
In this case these braces are taking about 500 lbs of compression, a relatively small amount. As long as this value is small then we can still consider these as tension-only members.
Physical Members
Physical Members provide fixity to all joints that occur along the length of the member, without breaking that member into multiple smaller members. You may use the physical member feature to avoid defining one 'field' member with multiple members in your model. This saves time in building and editing your model and in understanding your results.
To define a Physical Member, check the Physical Member box in the Set Member Properties settings or in the Modify Member Parameters settings. You may also specify Physical Members in the Members Spreadsheet and in the Member Information settings.
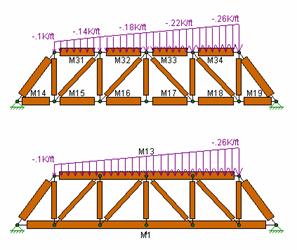
To understand the benefits of Physical Members see the trusses in the following figure. The first truss shows the chords modeled without physical members and thus with multiple members modeling each chord. The second truss models each chord with one Physical Member. Both models will yield the same results. However the Physical Member model is more intuitive and easier to work with because you don’t have to work with multiple members when you create the chords, load them, edit them or evaluate their results. Notice that the distributed load may be defined from start to end for the Physical Member. In the other model the distributed load end magnitudes have to be specified for each of five members in order for the entire load to be defined.
Continuous beams
Physical Members are also effective in managing results because the
results for one Physical Member are reported together in the results spreadsheets
and the
- You may convert a Physical Member into multiple members by removing the Physical Member property and then performing a Model Merge to split the member for connectivity. See Model Merge for more information.
- You cannot convert
multiple
For additional advice on this topic, please see the RISA Tips & Tricks webpage at risa.com/post/support. Type in Search keywords: What are Physical Members.
Local Axes
The following diagram illustrates the directions of the member's local axes that are used to define member forces, stresses, and deflections as well as loads defined in local axes directions:
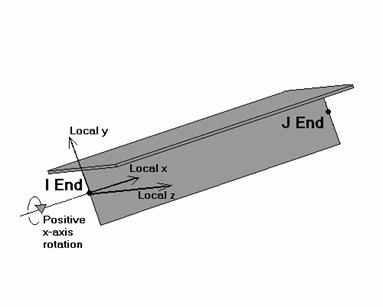
As can be seen from the diagram, the local x-axis corresponds to the member centerline. The centerline designates the member cross section's centroid location. The positive direction of this local x-axis is from the I-joint towards the J joint. The complicated part is defining the orientation for the local y and z-axes. Of course, we only have to define the direction for one of these two (y and z) axes. The third axis direction follows automatically based on the directions of the first two.
If you do not explicitly define the orientation for a member, the default is for the member's local z-axis to lie in the global X-Z plane or as near as possible. If the member is defined in the global Y-direction, the member's local y and z axes both lie in the global X-Z plane, so the local z-axis is made parallel to the global Z-axis. This works well for models with the Y-axis as the vertical axis because any beam members are typically oriented such that vertical loads are resisted by the strong axis bending of the member. You can change the default orientation of the members with the Model Settings. For example if your vertical axis is the Z-axis then you can specify the default so that vertical loads are resisted by the strong axis bending of the member.
Member Orientation
RISA-3D provides two ways to explicitly set the orientation of the y-axis. The first is by rotating the member about the local x-axis. This member rotation is entered in the x-Axis Rotate column on the Member spreadsheet or may be specified in the graphic editing tools. For this rotation, positive is counter-clockwise about the x-axis, with the x-axis pointing towards you.
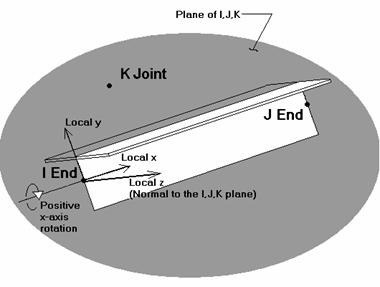
The second way to explicitly define the orientation is by specifying a K joint for the member. If a K joint is defined the three joints (I,J,K) entered for the member are used to define a plane. This plane is the plane of the member's x and y-axes. The z-axis is defined based on the right hand rule using the x and y-axes. See below:
 button on the Quick View toolbar on the Home tab.
button on the Quick View toolbar on the Home tab.Member End Releases
The I Release and J Release fields are used to designate whether the forces and moments at the ends of the member are considered fixed to or released from the member's points of attachment (the I and J joints). Each member has 6 force components at each end (axial, y-y & z-z shear, torque, and y-y & z-z bending). Any or all of these force components can be released from the member's point of attachment. If a force component is released, that force is not transferred between the joint and the member.
The partial fixity member end release option reduces the joint rotational stiffness about the member local y and z axes. The linear stiffness of the connection is reduced by the rotational spring constant to utilize a partially restrained connection, as opposed to a fully released or fixed connection.
To specify member releases go to the I Release or J Release
field for the member in the Members Spreadsheet on the Advanced Tab, click the  button,
and specify the condition.
button,
and specify the condition.

Click on image to enlarge it
Alternatively, you may specify the end condition by directly typing in the field. To indicate that a force component is released, put a X for that component in the release field. You can move within the release field using the space bar which will result in a O for no release.
RISA-3D has two special "keyword" release configurations built-in. These are:
AllPIN => Mx, My, Mz (all moments) released (OOOXXX)
BenPIN => My, Mz (bending only) released (OOOOXX)
If a Partial Fixity Option is selected, the keyword will show a P for the rotational restraint followed by the rotational stiffness input.
These keyword entries are included because 99% of the release configurations you'll ever want to define will be one of these two (98% will be BenPIN). You can call out the keyword entry by just entering the first letter of the keyword. So if you go to a release field and enter "bp", the keyword "BenPIN" will be filled in automatically.
- RISA-3D will not allow you to release the member torsion at both ends. This is because it will be unstable as it would be free to spin about its centerline. For this reason, pinned end conditions should be modeled using the "BenPIN" entry instead of "AllPIN".
- A partial fixity end release cannot be combined with a member end offset.
- Shear deformations are not considered for members with partial fixity end releases.
- Tapered WF members cannot be used in conjunction with partial fixity end releases.
For additional advice on this topic, please see the RISA Tips & Tricks webpage at risa.com/post/support. Type in Search keywords: End Release.
Simpson Yield-Link
The Yield-Link is a prequalified connection developed and manufactured by Simpson Strong-Tie for steel special moment frames. For more information about the Yield-Link Connections, click the link to visit the Simpson Strong-Tie’s website here.
Currently in the program Yield-Links can be added to steel beams as Member End Releases to include their partial rotational stiffness in the analysis. The program calculates the rotational stiffness automatically based on the sizes of the Yield-Link and the beam.
To add a Yield-Link to a beam, click on the ellipsis button next to the I Release or J Release field to open the Set Member End Releases dialog. The Yield-Link size can be selected from the dropdown box under Simpson Yield-Link.

Click on image to enlarge it
When choosing a specific Yield-Link to use, the nomenclature for the definition of the release is as follows: YL4-2.25, where YL4 represents the Yield-Link stem thickness in eighths of an inch (ex. 0.5” = 4 x ⅛”) and 2.25 is the width of the yield link (in inches). For new series of Yield-Link with longer lengths, the nomenclature can be as follows: YL4-2.25-10, where the last number 10 is the longer length than standard links (in inches)
Users can also type in the Yield-Link size in the I Release or J Release field from either the Properties Panel or the Members -> Advanced Spreadsheet. The nomenclature of Yield-Link (e.g. YL4-2.25) needs to be followed for the program to recognize the input.

Click on image to enlarge it
The selection of Yield-Link size needs to meet the following requirements:
- Yield-Link is only available for Hot-Rolled Wide Flange Beams.
- Currently the maximum beam depth allowed for Yield-Link is W36. The minimum beam depth allowed for Yield-Link range from W12, W16, and W24 depending on which Yield-Link series is used:
YL4 series: Min. W12, Max. W18
YL4 longer series: Min. W12, Max. W27
YL6 series: Min. W16, Max. W27
YL6 longer series: Min. W16, Max. W36
YL8 series: Min. W24, Max. W36
YL8 longer series: Min. W24, Max. W36
- The permitted beam flange thickness needs to be greater than 0.4 inch.
- The permitted beam flange width and column flange width for any specific Yield-Link size can be found in Simpson's Yield-Link Design Guide.
- If Yield-Link is used on one end of a beam, the other end cannot have Fully Fixed or Custom Releases.
- If Yield-Links are used on both ends of a beam, the link size must be the same at each end.
If the input Yield-Link size and beam size do not meet the above requirements, the program will ignore the Yield-Link rotational stiffness during solution. A warning message will be given to indicate which requirement was not met.
Once users have input the Yield-Link size, together with the Beam Size, the program calculates the rotational stiffness of the Yield-Link and displays it in the I and J Release Edit dialog. This partial stiffness will be used in solution for the model. The rotational stiffness calculation follows the following equations:
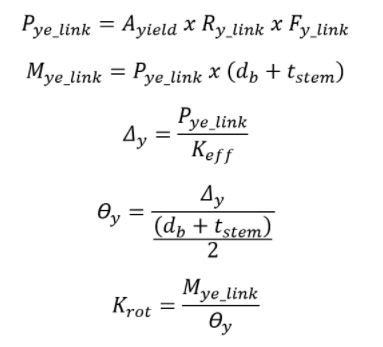
With the Yield-Link defined, the wireframe model shows the member end release condition applied. The display looks the same as custom end releases in the Mz direction, which is the same direction where the Yield-Link rotational stiffness is applied.
After solution, the partial stiffness from Yield-Links can be viewed in the member Detailed Report under the I/J releases.

Click on image to enlarge it
Deflection Ratio Options
The Beam Deflection Ratio can be used during member design to check the deflection criteria. By default, the program determines whether a member is a cantilever or is supported on both ends. In certain cases where the beam should be considered otherwise, more control over these support types for a beam can be designated in the Deflection Ratio Options. This feature is only applicable to members designated as "beams" and only affects the beam deflection ratios located in the Beam Deflection tab of the Member Deflections spreadsheet.
The option to set the support type for the beam deflection ratio can be applied from any of the following locations:
- Additional Properties section of the Properties Panel
- Members spreadsheet \ Advanced Tab
Clicking the button in the spreadsheet brings up the following dialog box:

Click on image to enlarge it
Single span beams can be designated as supported on both ends, or cantilever on either I- or J- end. Multi-span beams have an additional option to be cantilever on both I- and J- end. A double cantilever option is available for multi-span beams since internal supports will support the beam. Designating member ends as either supported or cantilever will affect only the beam relative deflection and also determine which equation is used when calculating beam deflection ratios. See Beam Deflections.
For a member supported on both ends, the maximum relative displacement used in the beam deflection ratio will be the largest straight line distance (in the vertical y direction) between the deflected shape and the original undeflected shape.

Click on image to enlarge it
For members with a cantilever end, the location of the maximum relative deflection will be at the free end of the member. The displacement value is equal to the rotation at the supported end multiplied by the length of the member.

Click on image to enlarge it
- Designating specific member end support types for the beam deflection ratio will not affect global deflection or the member deflection ratios located in the Service and Strength tabs of the Member Deflections spreadsheet.
- For additional information on this topic, please see the RISA Tips & Tricks web page at risa.com/post/support. Type in Search keywords: Deflection Ratio
Analysis Offset
The Analysis Offset feature allows a member to be offset from its centerline for analysis. When it is enabled the member is actually shifted to the offset location for analysis. In order to provide connectivity the program places hidden rigid links to connect the member to the nodes that define the member's I/J Joints. Joints which fall along a physical member are also automatically connected to the member's actual analysis location via hidden rigid links.
An analysis offset can be applied from any of the following locations:
- Additional Properties section of the Properties Panel
- Members Spreadsheet \ Advanced Tab
Clicking the button in the panel or spreadsheet to bring up the following dialog box:

Click on image to enlarge it
The blue dot represents where the member is drawn in the model, the shape represents where the shape will be offset relative to the centerline. Therefore in the above image the wide flange is offset in a way to account for the connections on this member being on the "vertical" (local y-axis) leg. In the below image the angle is offset in a way to account for the connections on this member being on the "horizontal" (local z-axis) leg.

Click on image to enlarge it
In this case there would be no practical application for using a -z axis or -y axis setting since neither leg would be near the line that the member was modeled on.
The most common application for this feature is modeling non-symmetric braces where the centroid of the brace does not align in the same plane as the columns/beams that the brace connects to. See the example below.
Example:
Consider a single angle brace that frames into a beam and column

Click on image to enlarge it
In RISA-3D this would be modeled so that both the brace and the beam end connect to the same Joint, which the column also passes through

Click on image to enlarge it
When lateral load is applied to this frame with no analysis offset, the brace has a concentric axial force since its centerline aligns with the centerline of the beam and column. This would be accurate for a double-angle brace, but for a single angle brace the centroid of the brace is actually offset from the plane of the frame by a small but significant distance. That offset eccentricity should cause a bending in the brace which accompanies an axial compression force in the brace. This can be accounted for by shifting the location of the brace to its true centroid location.

Click on image to enlarge it
In this case the brace should be shifted along its positive Local z-axis by a distance of z-bar (distance from centroid to connected leg) plus half the gusset plate thickness. For a 3/4" gusset plate the analysis offset should be set to the +z axis plus 3/8":

Click on image to enlarge it
For analysis the program will move the brace outward and put in a rigid link. This rigid link is not visible in the wireframe view, although the rendered view and deflected shape will both illustrate the offset location of the member. Below is a reconstructed view of what the program actually uses for analysis in this example.

Click on image to enlarge it
The end result is that the brace bends in the out of plane direction when loaded with axial compression, which matches what should occur for a single angle that is bolted on only one leg.

Click on image to enlarge it
Unless both legs of the single angle are attached to the gusset in this example it is actually unconservative to omit the analysis offset in the model, since bending will be ignored without it.
Col-Wall Vert Release
This option is only visible for models transferred from RISAFloor and is applicable solely to columns transferred from RISAFloor. It defines the vertical connectivity between the column and the connected wall panel. If this option is selected, the column and wall panel will be decoupled in the vertical direction during analysis. This implies that the axial load in the column will not be transferred to the wall panel, and vice versa. However, it's important to note that connectivity for other degrees of freedom, including in-plane and out-of-plane bending/shear, remains intact. As a result, forces associated with these degrees of freedom will continue to be transferred between the column and the wall panel.
The program implements this decoupling behavior by generating two sets of nodes along the column axis: one set for the column and another for the wall panel. It then defines the connectivity between these two sets of nodes. When users select the 'Col-Wall Vert Release' checkbox, the program releases the connectivity between the two node sets in the vertical direction while maintaining connectivity in other degrees of freedom.
- Since there are two sets of nodes along the column axis, the program must determine whether any loads applied to these nodes should apply to the column node set or the wall panel node set. A similar determination must be made for the reactions from any elements connected to these nodes. Nodal loads applied directly on a column, and members connected to a column, are resisted and supported directly by the column member. All other load types (line loads, area loads, etc.) and element types (plates, wall panels, diaphragms, etc.) are considered to be connected to the wall panels.
Member offsets reflect the fact that the member ends may not be attached at the centerline of the member being attached to. For example, a beam connected to the flange of a column is offset from the centerline of the column. The distance of the offset would be ½ the depth of the column.
You may enter explicit offset distances or have them calculated automatically. To enter offsets explicitly simply enter the value of the offset. To have the offset calculated, enter the non-numeric label of the member whose depth defines the offset distance.
For example, say your member is framing into the flange of a 12" deep column. The offset distance would be 6", so you would enter '6' for the offset. Now, if that column gets changed to a 14" shape, you would have to go back and change the offset distance to 7". This can be time consuming if you have many offsets.
If instead the column has a label of M100, specifying M100 as the member offset causes the offset to be calculated as half of the depth of the member M100. For the W12 column the offset would be 6" and when the column is changed to a W14 the offset becomes 7".
- When you use a member label to define the end offset, this value is ALWAYS taken as simply the depth of the member. Thus, if you are framing at an angle into a member or into the weak axis of a member you should not use this feature.
- When the model is solved the member length is adjusted in the stiffness matrix by the offset distance resulting in a shorter, stiffer member. Also the results listed for members with offsets do take into account the offset distances. The I-end and J-end results are the results at the offset locations, and the report locations are determined by dividing the member length minus the offset distances by the Number Of Sections on the Model Settings.
For additional advice on this topic, please see the RISA Tips & Tricks webpage at risa.com/post/support. Type in Search keywords: Offsets.
Inactive and Excluded Elements
Making an element, such as a member, plate or wall panel, inactive allows you to analyze the structure without the item, without having to delete the information that defines it. This leaves data intact so the item may be easily reactivated. This is handy if you want to try a frame with and then without certain items, without having to actually delete the data.
Making an element Inactive means the item is not included when the model is solved or plotted.
Making an element Excluded means the item is in the solution, but excluded from the results list. An excluded item will be treated like any other member in the solution and plotting of the model, but the item will not be listed in the solution results (forces, stresses, deflections, etc.). This is useful if there are certain items whose results you're not interested in. You don't have to clutter up the results with these items and can concentrate on the items you're most interested in. See Printing for more limiting printed results.
Shear Deformations
Including shear deformation models the effects of shearing forces on the lateral displacements of the members. Shear deformation is included in the analysis by checking the Consider Shear Deformation box in the Solution tab of the Model Settings.
Shear deformation effects are based on the material shear modulus (G) and the shear area.
Including shear deformation causes the member stiffness matrix to be modified by the term M, where:
Where As = Area * Shear Deformation Factor
These shear area coefficients will be automatically calculated for all standard members, but must be entered for arbitrary sections. While these shear deformation factors are always less than 1.0, they can vary from 0.85 for solid rectangular shapes, to 0.88 for solid circular shapes, to 0.53 for thin pipes. These coefficients are used strictly for shear deformation effects and should not to be confused with shear stress factors described in the next section. A good reference for the calculation of both of these coefficients is Stress, Strain, and Structural Matrices by Walter D. Pilkey.
For members whose length is much greater than the depth, shear deformation has a relatively minor impact. When the length of the member is less than 10 times its depth, shear deformation begins to have a significant impact on the solution. Keep this in mind if you are creating models where members are being broken up into several pieces because the length used to calculate the term M is the joint-to-joint member length.
- Shear deformation effects are included for the joint deflections only and not for the internal member deflections.
- Shear deformation effects are included for joint loads and not for member point loads.
- Shear deformation can play a significant role in the stiffness of the member and thus the results.
The equation for calculating shear area varies for different shape types:
- For WT, LL, L, Av =(depth*thickness)/1.2
- For channel, Av =(depth*thickness)/1.0
- For rectangular tube, Av =(2*depth*thickness)/1.0 for AISC 360-05 (13th edition) and AISC 360-10 (14th edition), but (2*(depth-3*web thickness2))/1.0 for AISC 360-16 (15th edition) and AISC 360-22 (16th Edition).
- For round tube, Av =A/2
Member Shear Stresses
Since shear stress is not equally distributed over a cross section, it is unconservative to take the maximum shear stress as simply the beam shear (V) divided by the beam’s cross sectional area. To achieve more accurate results you must reduce the shear area by a shear stress factor,
where:

and

These shear stress factors will be automatically calculated for all standard members, but must be entered for arbitrary sections. While these shear area coefficients are always less than 1.0, they can vary significantly. Common values include 0.67 for solid rectangular shapes, and 0.75 for solid circular shapes.
Torsion
A twisting of the member induces torsional forces and stresses. The primary reference used in the development of RISA-3D's torsional calculations was Design Guide #9, Torsional Analysis of Steel Members, available from the AISC. The equations used for torsional stresses won't all be repeated here, but they can be found in the reference. RISA-3D models warping members using CASE 2 from the torsional reference.
It is more accurate to consider warping effects when calculating member stiffnesses and stresses, but there is a way you can turn off these effects. In the Model Settings on the Solution tab, you'll see the checkbox Consider Torsional Warping. If this box is not checked warping effects will not be considered, i.e. stress and stiffness calculations for wide flanges and channels will be done just like all the other shapes (k = GJ/L). You may wish to do this to compare the RISA-3D results with and then without warping, or to compare RISA-3D results with a program that does not include warping.
Warping
A primary consideration in the calculation of torsional properties and stresses is whether the cross section is subject to warping. Solid cross sections are NOT subject to warping. For RISA-3D, all closed shapes such as pipes and tubes are considered to be NOT subject to warping. Cross sections composed of rectangular elements whose centerlines all intersect at a common point are NOT subject to warping. Examples are Tee shapes and angle shapes. For simplification, double angle cross sections are also assumed to be not subject to warping. So, the only shapes RISA-3D considers subject to warping effects are wide flanges and channels (I's and C's). The importance of this extends beyond the stress calculations, however. Warping considerations also impact the calculation of torsional stiffness for these shapes.
For a nonwarping member or a warping member with warping unrestrained, the member's torsional stiffness is given by:

G
= Material Shear Modulus
J = Cross Section Torsional Stiffness
L = Member Length
For a member subject to warping, if the warping of the member is restrained its torsional stiffness is:

Cw = Cross Section Warping Constant
E = Material Modulus of Elasticity
L = Torque Length
Thus restraining the warping effects for a cross section subject to warping (I's or C's) makes the shape much stiffer in torsion. Think of it this way; if you twist a wide flange, the flanges want to warp. If you restrain the flanges from warping its much harder to twist the wide flange as it is stiffer in torsion.
Member Releases
If a member is released for any rotational degree of freedom at either end, warping is not considered for that member. For example, if you model a wide flange member with a “BenPIN” release code (at either or both ends), warping would not be considered for that member. This is because any connection that doesn't resist bending moments is certainly not going to restrain warping. RISA-3D does not consider the effect of warping “pins” at this time.
Warp Length
The "warp length" is the length between points of torsional restraint (or release). This may be equal to or greater than the member's actual joint to joint length. This warp length is calculated automatically by RISA-3D and is used for the member's torsional stiffness and stress calculations. Each member’s warp length is shown on the member detail report (see Member Detail Report).
Physical members that are subject to torsion will always have their warp length be at least the length of the physical member. Members framing in along the length of the physical member are assumed to not reduce the warp length.
Note that the calculation of the warp length by RISA-3D can be “fooled” by beams that are modeled by several segments. The warp length used for each member will be the length of each straight-line segment rather than the whole length. Using Physical Members rather than member segments will avoid this. This is not possible however when modeling curved members with straight line segments.
Warping Pins
A member that is subject to warping effects, like a WF or channel shape, will still experience warping stresses, even if warping restraint is not provided at the ends of the member. RISA-3D currently does NOT consider any warping effects for members that have warping “pinned” end conditions. The addition of warping effects for members with warping pins will be addressed in a future program version.
RISA-3D calculates and lists the torsional stresses for the members of the structure, including the warping stresses.
Pure torsional shear is calculated for all non-warping “open section” shapes based on the equation:

Mx = Torsion Moment
t = Maximum Thickness of Any Part of the Cross Section
This is the only torsional stress calculated for non-warping shapes. Shape types that are not “open cross sections” will have their shear stresses calculated with equations that are appropriate for each type.
For warping shapes (I's and C's), three separate stresses are calculated: pure torsion shear, warping shear and warping normal (bending) stresses. These results are all listed for review. The equations used to calculate these values won't be listed here but they are contained in the reference.
Code Check
These torsional stresses are included when the AISC code check (ASD or LRFD) is calculated for the member.
The ‘shear stresses’ (pure torsion and warping) are included in the required shear force that is then used in the Shear UC check:
The warping normal stresses are added to the ‘weak axis bending stresses’ for calculation of the required weak axis bending moment that is then used in the Max UC check. By “weak axis bending stresses”, we mean the bending stresses produced by moments about the local y-axis. When including shear stresses from torsion in the shear code check, the program uses the worst case of the torsional shear stresses (top and bottom flanges or web) and combines that with the actual shear stresses due to pure flexure. This is intentionally conservative in cases where the worst case torsional shear occurs in the flange, but the worst case flexural shear occurs in the web.
Applied Torsional Loads
You can apply member point torques along the length of the member. However, these loads are intended to work only for non-warping members. The reason is that there are many derivatives necessary to properly handle these member point torques when applied to warping members. The calculations for non-warping members is quite simple, but for warping members they're complex. This may be added in a future version.